جام جهانی پرتاب ربات در فضا
آژانسهای فضایی سراسر دنیا،تعدادی از مهمترین و مشهورترین روباتهای ساخته شده برای اکتشافات فضایی را معرفی کند.
به گزارش شهرآرانیوز، از زمانی که یک مسابقه هیجانانگیز فضایی در دهه1960 آغاز شد، آژانسهای فضایی سراسر دنیا، شروع به ساخت، آزمایش و پرتاب روباتهای مختلفی کردند. هرکدام از این روباتها برای یک ماموریت ویژه طراحی شدند تا درباره اتمسفر زمین، کره ماه، مریخ، منظومه شمسی و حتی فراتر از آن، به ما اطلاعات بیشتری دهند. این روباتها از نخستین ماهنورد اتحاد جماهیر شوروی سابق در دهه1970 گرفته تا مریخنورد Mars 2020 که چندی پیش نام آن هم انتخاب شد، وظایف بسیار خطرناک یا کمهیجانی را برای انسانها انجام دادهاند و به دوردستترین و ناشناختهترین نقاط سفر کردهاند. این گزارش تلاش میکند که تعدادی از مهمترین و مشهورترین روباتهای ساخته شده برای اکتشافات فضایی را معرفی کند.
Lunokhod 1
یک سال پس از آنکه نیل آرمسترانگ پا به کره ماه گذاشت، اتحاد جماهیر شوروی سابق نخستین ماهنورد روباتیک خود را بهنام Lunokhod 1 با موفقیت روی سطح کره ماه فرود آورد. از نوامبر 1970 تا تابستان سال بعد، این ماهنورد که از سوی شوروی سابق بهصورت کنترل از راه دور هدایت میشد، بیش از 10کیلومتر را روی سطح ماه طی کرد. برای اینکه به عمق این دستاورد پیببریم، باید بدانیم که مریخنورد Optionunity ناسا طی 6سال توانست فقط 12کیلومتر را بپیماید. ماهنورد شوروی سابق در طول روز با انرژی خورشید و در شب با یک گرماده حرارتی پولونیومی کار میکرد تا از دمای منفی 150درجه سانتیگراد در امان بماند. این وسیله روباتیک اطلاعاتی درباره خاک ماه و برخی از نخستین و نزدیکترین تصاویر را از دهانههای ماه به زمین ارسال کرد.
کالسکه آپولو 15
اولین ماهنورد ناسا که به کالسکه ماه معروف بود تا زمانی که Lunokhod 1 در ژوئیه سال1971 به ماموریتش (انتقال اطلاعات به زمین) پایان داد، نتوانست رویماه فرود بیاید. کالسکه آپولو15 بهعنوان بخشی از ماموریت سرنشیندار آپولو15، میتوانست به فضانوردان کمک کند تا فراتر از محل فرود، عملیات اکتشافی خود را انجام دهند و نمونههای شگفتانگیزتر و ناشناختهتری را جمعآوری کنند. این وسیله نقلیه خاص در طول این ماموریت، کلا 27کیلومتر یا 3ساعت و 2دقیقه را طی کرد.
اینماهنورد از نظر تکنولوژیک، پایه و اساس هر سطحنوردی است که از آن زمان تاکنون ساخته و راهاندازی شده است.
Chang’e 4
کاوش در نیمه تاریک ماه همیشه یکی از دغدغههای دانشمندان در عصر جدید بوده است. تلاشهای بسیاری در این زمینه صورت گرفته که احتمالاماهنورد چینی Chang’e 4 موفقترین آنها بوده است. این ماهنورد روباتیک که بخشی از مرحله دوم برنامههای اکتشافات قمری چین بهشمار میآید، در واقع، نخستین فرود آرام بشر در سطح تاریک ماه است که در سوم ژانویه سال2019 انجام شد.
برنامه اکتشاف قمری چینیها بهگونهای طراحی شده است که طی 4مرحله به پیشرفتهای فناورانه ادامه میدهد. نخستین مرحله رسیدن به مدارماه بود؛ وظیفهای که به وسیله Chang’e 1 در سال2007 و Chang’e 2 در سال2010 انجام شد. دومین مرحله فرود آمدن و حرکت روی سطح ماه است که Chang’e 3 در سال2013 و Chang’e 4 در سال2019 آنرا انجام دادند. البته بخشی از ماموریت Chang’e 4 یافتن نمونههای قمری است. سومین مرحله، جمعآوری نمونههای قمری و ارسال آنها به زمین است که در آینده Chang’e 5 و Chang’e 6 انجام میدهند و مرحله چهارم شامل توسعه ایستگاه تحقیقاتی روباتیک در نزدیکی قطب جنوب ماه خواهد بود.
یک برخورد قدیمی در ماه، دهانهای بسیار بزرگ به نام حوضه آیتکن را ایجاد کرده است که اکنون حدود 13کیلومتر عمق دارد و تصور میشود که ضربات گسترده باعث شده مواد بین پوسته و هسته ماه در دسترس باشند. اگر Chang’e 4 بتواند مقداری از این مواد را بیابد و مورد مطالعه قرار دهد، میتواند اطلاعات بیسابقهای از ساختار درونی ماه بهدست آورد.
سوجورنر
یکی دیگر از نخستین وسایل روباتیک فضایی، سوجورنر بود که بهعنوان یک مریخنورد روباتیک روی مریخ فرود آمد. این مریخنورد که بعدا به اسم سوجورنر تروث (فعال حقوق بشر آفریقایی -آمریکایی و مدافع حقوق زنان و مخالف بردهداری) نامگذاری شد، منطقهای از سیاره سرخ را در اطراف محل فرود خود به نام «آرس والیس» کاوش کرد. این منطقه که تصور میشد محل قدیمی عبور مایعات است، مسطح بود و فرود مریخنورد به شکلی ایمن امکانپذیر میشد. سوجورنر از زمان فرود در 4ژوئیه1997 تا 2ماه بعد که عملیات انتقال اطلاعات به پایان رسید، 550تصویر از مریخ ارسال کرد و همچنین یافتههای عمیقتری از نوع خاک، باد و هوای این سیاره را در اختیار دانشمندان قرار داد.
Opportunity
این مریخنورد پس از 15سال ماموریت متناوب، آخرین انتقال دادهها به مرکز ناسا را در تاریخ 10ژوئن2018 انجام داد تا به ماموریت خود پایان دهد. Opportunity در ژانویه 2004 و 20روز پس از فرود سطح نورد Spirit در طرف دیگر مریخ و در دهانه گوسف، در منطقه Meridiani Planum این سیاره فرود آمد. Spirit پیش از پایان ماموریت خود در ماه مه2011 تقریبا 8کیلومتر را طی کرد، درحالیکه Opportunity با پیمودن 45کیلومتر رکورددار شد. این مریخنورد در طول سفر خود، بیش از 217هزار تصویر را ثبت کرد.
دکستر
دکستر که تا حدودی به زمین نزدیک است، یک روبات فضایی «کنترل از راه دور» با 2بازوست که بهوسیله سازمان فضایی کانادا (CSA) برای کمک به ایستگاه بینالمللی فضایی (ISS) ساخته شده است. این روبات نخستین وظیفه برنامهریزی شده خود را که کمک به فضانوردان برای حفظ و نگهداری این ایستگاه فضایی بود، در فوریه2011 بهاتمام رساند. دکستر بهطور خاص، از عهده کارهای سخت و معمولی که باید در داخل و خارج از این ایستگاه انجام شود، برمیآید. این روبات جایگزین یکی از دوربینهای بخش بیرونی ایستگاه بینالمللی فضایی شده است. دکستر که از زمین و بهوسیله سازمان فضایی کانادا کنترل میشود، بهگونهای به فضانوردان کمک میکند که آنها وقت بیشتری برای انجام آزمایشهای علمی داشته باشند. هریک از بازوهای این روبات دارای 7مفصل است که میتوانند به بالا و پایین و طرفین حرکت کنند و بچرخند. هر دست دارای یک آچار، یک دوربین و چندین چراغ و البته یک کانکتور برای تأمین برق، داده و ارتباطات ویدئویی است.
Athlete
این سطح نورد توسط آزمایشگاه پیشران جت ناسا ساخته شده و یک وسیله نقلیه روباتیک است که میتواند روی هر نوع زمینی که در ماه، مریخ و فراتر از آن مشاهده شده، راه برود و بچرخد. این وسیله طراحی شده است
تا به ماموریتهای روباتیک و سرنشیندار، حملونقل و ذخیره کالاها کمک کند. بهعنوان مثال، این نسخه میتواند به ایستگاههای سوختگیری متصل شود و نسخههای آینده قادر به اتصال به فضاپیماهایی هستند که 100برابر سریعتر از مریخنوردهای کاوشگر مریخ (Opportunity و Spirit) حرکت میکنند. Athlete تقریبا در هر نوع زمینی ازجمله تخته سنگهای عمودی میتواند حرکت کند.
مریخنورد کنجکاوی
«کنجکاوی» احتمالا مشهورترین مریخنورد و وسیلهای است که هنوز به فعالیت خود ادامه میدهد. این مریخنورد که به اندازه یک خودرو معمولی است، در تاریخ 6آگوست2012 روی مریخ فرود آمد و ماموریت خود را ابتدا بهمدت 2سال آغاز کرد، این در حالی بود که فقط 6ماه پس از فرود، ناسا این ماموریت را «بهطور نامحدود» تمدید کرد. این مریخنورد برای ارزیابی «قابل سکونت بودن» این سیاره ساخته شده است و دارای بزرگترین و پیشرفتهترین ابزارهای علمی است که تاکنون به سطح مریخ فرستاده شده است. این ابزارها میتوانند نمونههای سنگی را گردآوری کنند، شکل و ساختار آنها را تجزیه و تحلیل و سپس دادههای بهدست آمده را به زمین ارسال کنند.
رزالین فرانکلین
اروپا هم از این مسابقه روباتیک فضایی عقب نمانده و قرار است یک مریخنورد بهنام «رزالین فرانکلین» را در چارچوب پروژه ExoMars Rover که از سوی سازمان فضایی اروپا توسعه یافته در آیندهای نزدیک در مریخ فرود آورد. حرکت در سطح، حفاری زیرسطحی و جمعآوری خودکار نمونهها و پردازش دادهها از وظایف این مریخنورد است. رزالین فرانکلین از پنلهای خورشیدی برای تولید برق مورد نیاز خود استفاده میکند و برای در امان ماندن از شبهای سرد مریخ از باتریهای جدید و دستگاههای گرماساز بهره میبرد. این مریخنورد برای حرکت از 6چرخ استفاده میکند. هر جفت چرخ روی یک محور مفصلدار که پیشرانهای چرخ را نگهمیدارد، بهصورت معلق قرار گرفته و هر چرخ میتواند بهطور مستقل هدایت و رانده شود. همچنین از شیبسنجها و ژیروسکوپها برای کنترل حرکت استفاده میشود. ابزار نمونهبرداری زیرسطحی رزالین فرانکلین پس از بررسی کانیشناسی دیواره یک سوراخ، بهطور خودکار عمق مورد نیاز (حداکثر 2متر) را حفاری و یک نمونه کوچک را جمعآوری میکند. سپس این نمونه به آزمایشگاهی که در قلب وسیله نقلیه تعبیه شده، برای تجزیه و تحلیل تحویل داده میشود.
Robonaut
در بخش دیگری از ایستگاه بینالمللی فضایی، پروژه Robonaut با ارسال یک روبات انساننما برای «زندگی» در کنار خدمه این ایستگاه، پژوهشهایی را درباره فناوری روباتیک انجام داده است.
روباتهای چالاک Robonauts در مرکز فضایی جانسون ناسا در هوستون تگزاس ساخته شدهاند. مدل اصلی چندی پیش با 2پا، پردازشگرها و سنسورهای قویتر به روزرسانی و با اسم Robonaut 2 نامگذاری شد. این مدل به روزرسانی شده، وظیفه بررسی کارهای لازم برای حفظ و نگهداری ایستگاه بینالمللی فضایی در مدار را برعهده دارد. این وظایف، ساده، تکراری و در عین حال خطرناک هستند.
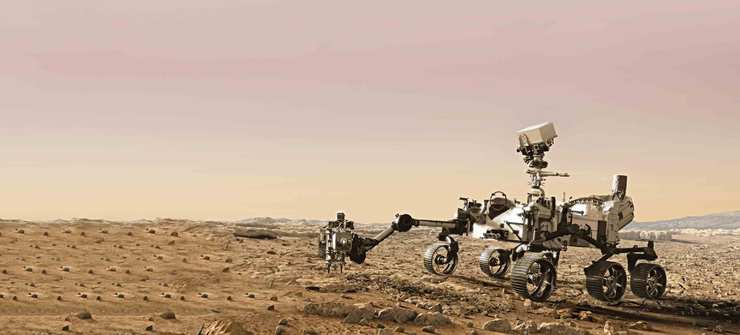
Perseverance
اما شاید آخرین وسیله روباتیکی که برای اکتشاف در مریخ ساخته شده است، مریخنورد Mars 2020 باشد که اخیرا نام Perseverance برای آن انتخاب شده. این مریخنورد قرار بود در تابستان امسال ماموریت خود را آغاز کند، اما ناسا اعلام کرد که بهخاطر بعضی از مشکلات فنی، این ماموریت به زمان دیگری موکول میشود؛ شاید 2022. در تیر و مرداد، زمین و مریخ در موقعیتهای خوبی نسبت به یکدیگر برای فرود در مریخ قرار دارند. در این زمان، سفر به مریخ در مقایسه با زمانهای دیگر که زمین و مریخ در موقعیتهای مختلف در مدارهای خود قرار دارند، انرژی کمتری لازم است.
ماموریت این مریخنورد که نامش به معنی ایستادگی، استقامت و پشتکار است، بخشی از برنامههای ناسا برای کاوش در مریخ است؛ کوششی درازمدت برای اکتشافات روباتیک در سیاره سرخ. ماموریت
Perseverance اهداف علمی اولویتدار برای کاوش در مریخ، از جمله سؤالات کلیدی در مورد امکان زندگی در این سیاره را دنبال میکند.
این ماموریت در گام بعدی، نهتنها بهدنبال نشانههایی از شرایط سکونت در سیاره سرخ طی گذشتههای دور است بلکه در جستوجوی نشانههایی از زندگی میکروبی در گذشته مریخ است. به این منظور، این مریخنورد به یک مته مجهز شده که میتواند نمونههای امیدوارکنندهای از سنگها و خاکهای مریخ را جمعآوری کند و آنها را در یک مخزن مخصوص که روی سطح این سیاره تعبیه شده، ذخیره کند. این ماموریت همچنین فرصتی برای دانشاندوزی و ارائه فناوریهایی فراهم میکند که چالشهای سفرهای آینده بشر به مریخ را برطرف میکند. این فرصتها شامل آزمایش روشی برای تولید اکسیژن از جو مریخ، شناسایی منابع دیگر (مانند آبهای زیرسطحی)، بهبود تکنیکهای فرود و توصیف آب و هوا، گردوغبار و سایر شرایط بالقوه محیطی است.
Perseverance در یک ماموریت 2.5میلیارد دلاری در داخل دهانه 45کیلومتری جیزرو مریخ فرود خواهد آمد و به این ترتیب برای نخستینبار، یک وسیله روباتیک با استفاده از 7 ابزار قدرتمند، بهطور فعال، نشانههای حیات در گذشته سیاره سرخ را جستوجو میکند.
این مریخنورد مجهز به یک ابزار راداری با قدرت نفوذ به درون زمین مریخ است که ذخایر یخ آب زیرزمینی را بهعنوان منبعی با ارزش برای فضانوردان، جستوجو میکند. همچنین ابزاری دیگر، تولید اکسیژن از جو نازک و غنی از دیاکسید کربن مریخ را آزمایش میکند.
این مریخنورد همچنین یک اکتشافگر کوچک هلیکوپتری را با خود حمل میکند که میتواند پروازهای کوتاه انجام دهد. در واقع این روتورکرافت میتواند هوای سیاره سرخ را کاوش کند. روتورکرافت به وسایل پروازی گفته میشود که بال یا وسیله حرکتی آنها ثابت نیست و با حرکت و چرخش ابزارها، پرواز میکنند. بهترین مثال از این نوع وسایل، بالگرد است.
perseverance همچنین دارای 23دوربین و 2میکروفون است که بهطور بالقوه این امکان را برای دانشمندان فراهم میکند که برای نخستین بار صدای مریخ را بشنوند. البته 2وسیله قبلی ناسا در مریخ، یعنی سطحنشین قطبی مریخ و سطح نشین ققنوس هم میکروفونهایی را با خود حمل میکردند اما اولی سقوط کرد و میکروفون ققنوس هرگز روشن نشد.
منبع :همشهری
ارسال نظرات
دیدگاه های ارسال شده توسط شما، پس از تائید توسط شهرآرانیوز در سایت منتشر خواهد شد.
نظراتی که حاوی توهین و افترا باشد منتشر نخواهد شد.



